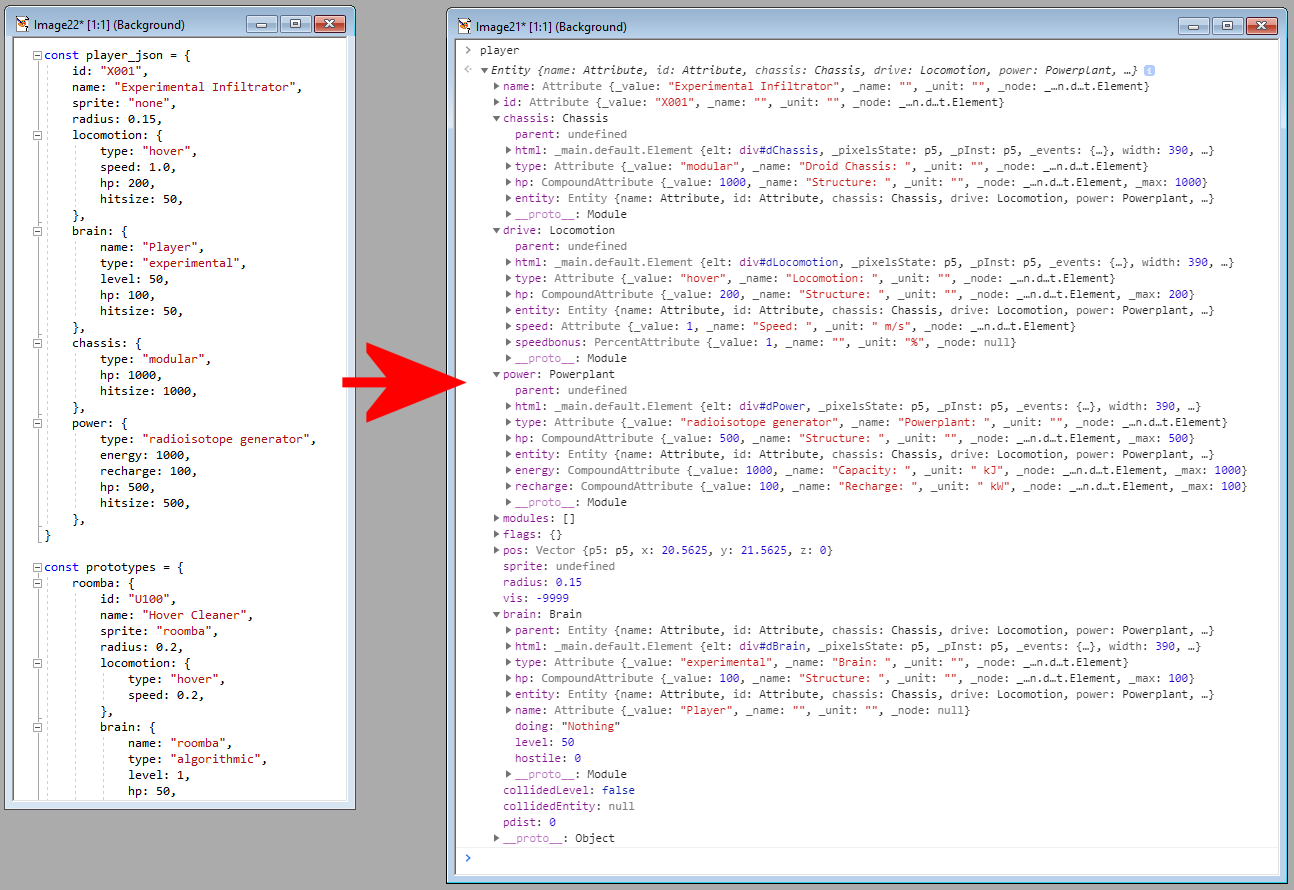
Play the 7DRL or updated current version of the game: http://refractivegames.com/x001/
------------------------------------------
A very ambitious plan, we'll see how much I can manage to implement of this. The main idea is the unusual viewpoint the game will be played from, a 360 degree raycasted view.
You're playing an infiltration droid trying to fulfill an objective (take over a ship/base, destroy everything, etc.)
The catch is: you're a robot. That means your sensors are limited to what your infiltration unit or the robot you're controller has.
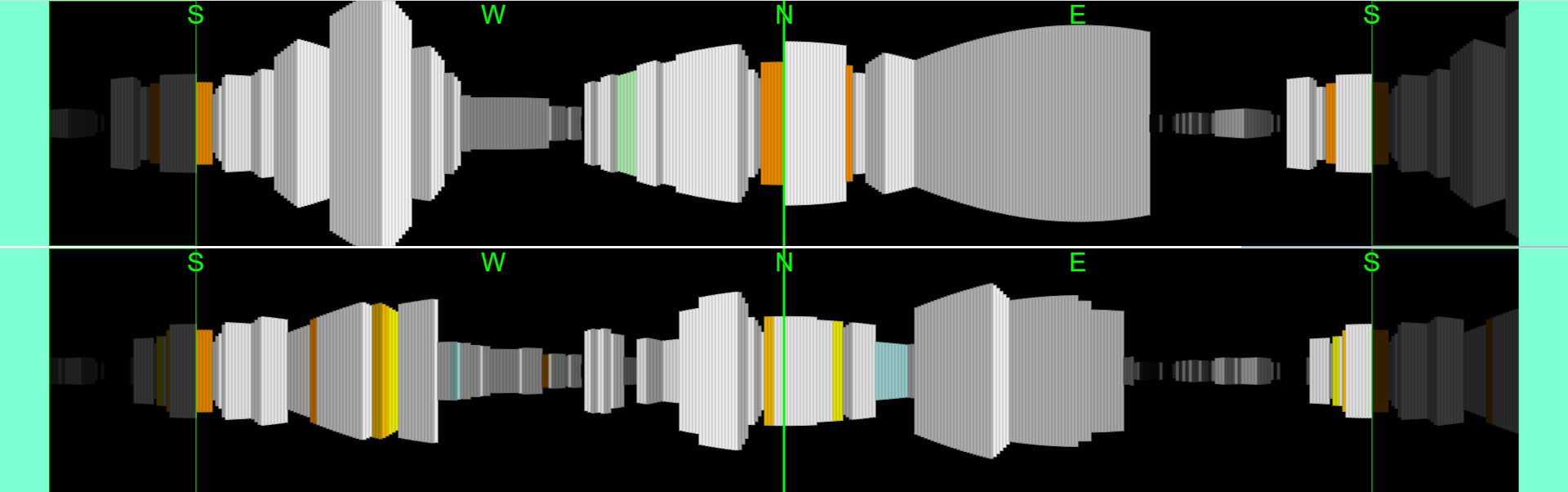
The basic sensor is a 1D LIDAR, which means your view of the world is 360 degrees, but limited to just distance to object information. More advanced sensors allow you a more nuanced view of the world, including modules that augment the display.
The game is realtime, but time doesn't advance unless you're performing an action (movement, shooting, etc.) This simulates the fact that as a robot you can think extremely fast.
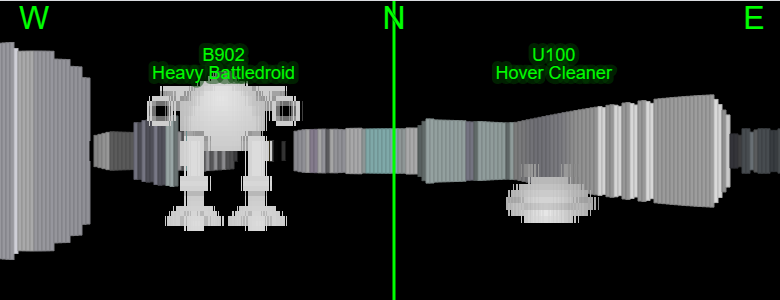
Advancement would be by adding modules to your robot, or taking over more advanced robots. For instance, a battle droid might have an IFF module that adds tag information to your LIDAR view identifying whether the obstruction is inert, friendly or hostile. (Colour coded display)
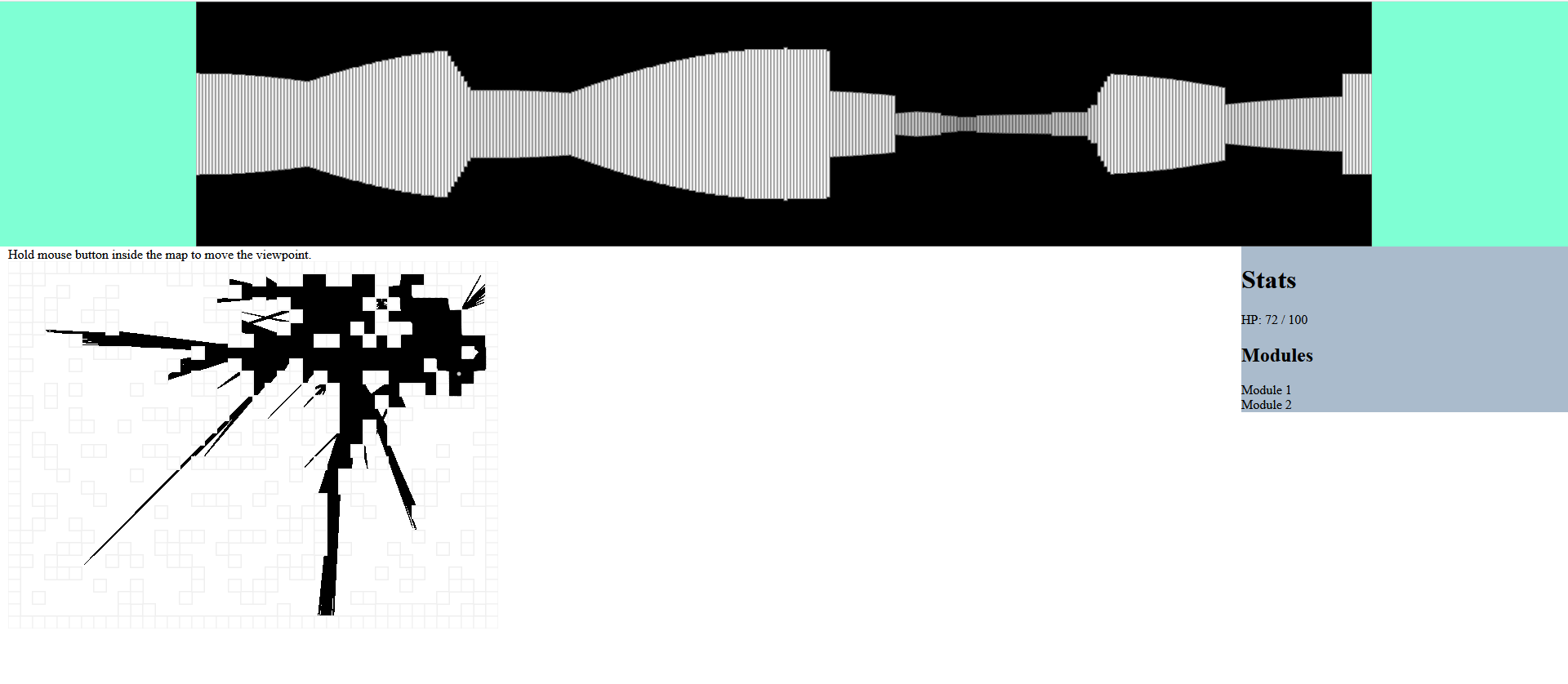
A mapper module enables you to see a top down map of your surroundings that your LIDAR has mapped.
RADAR allows you to see through obstructions, including walls.
And different droid chassises would have different modes of locomotion and different weapons. Some might require you to turn your entire droid to face the target, others have slewable "turrets". Locomotion includes hover/omniwheels (any direction), legs (faster forward, allows sidestepping), wheels (forward/back only) and tank tracks (allows turning in place)
Your droid is equipped with short ranged hacking capabilities that will allow you to take over other robots' chassis, giving you access to their (hopefully) improved sensors and armaments. Have to decide how this plart of the gameplay works still.
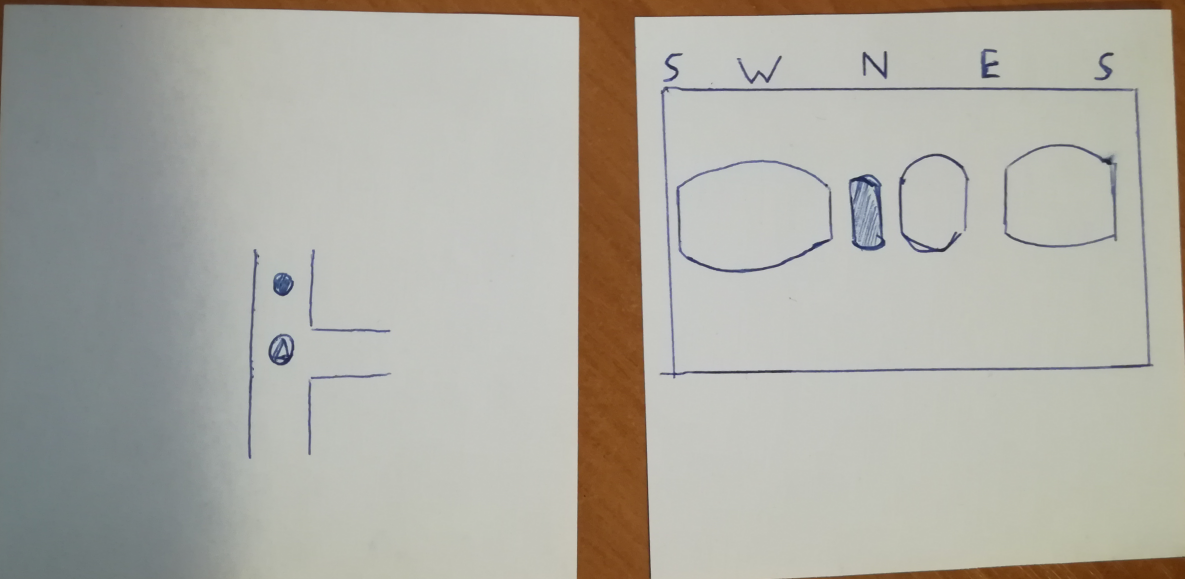
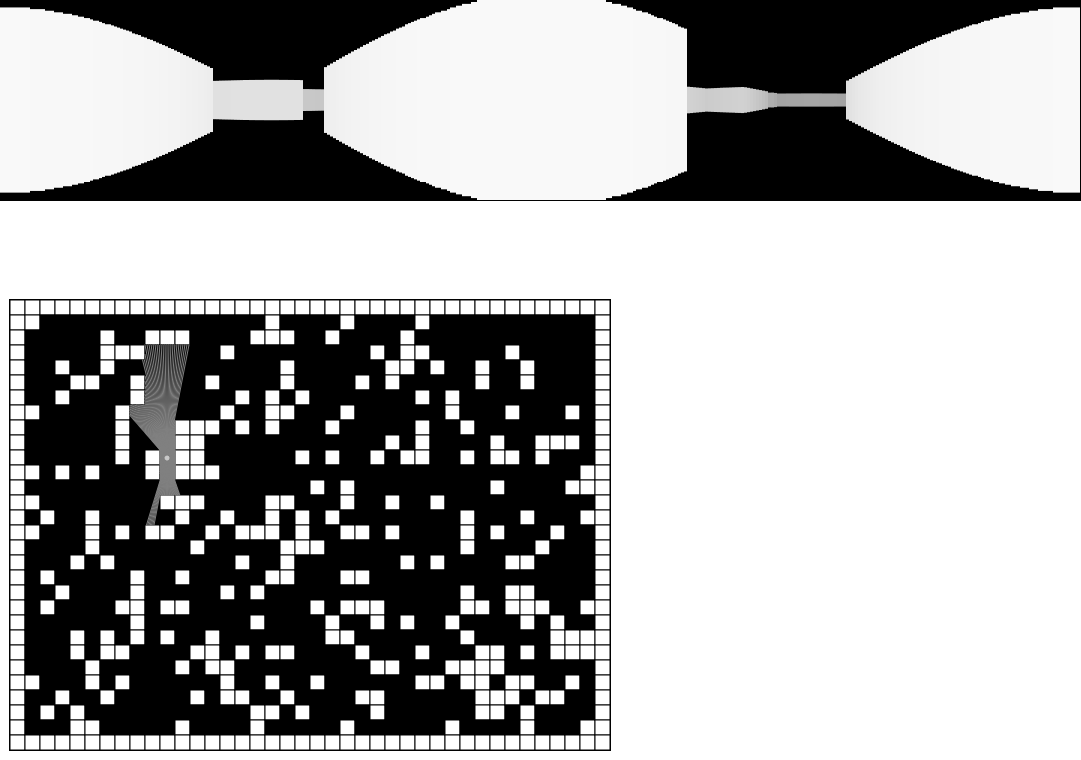
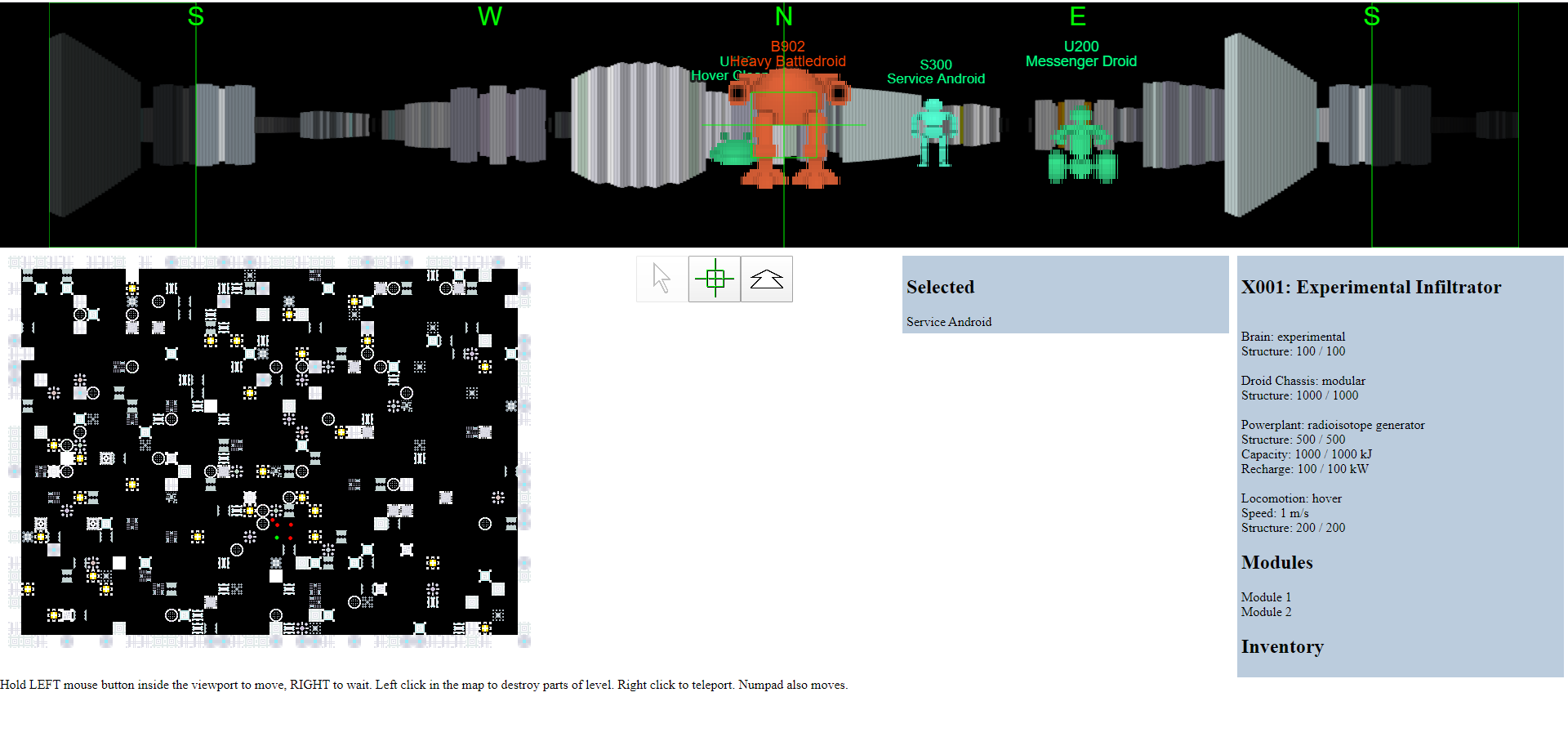
Right: Main viewport 1D LIDAR
Left: Mapper module map of the same situation (droid is in a north-east-south intersection with an enemy up ahead north)
Sensors:
- ultrasonic (short range, extremely low resolution)
- 1D LIDAR (moderate range, shows only distance to obstruction at each point)
- 2D LIDAR (longer range, shows an actual 2D image)
- RADAR (longest range, backscatter mode sees through walls)
- Some robots don't have full 360 degree FOV, they show only a smaller cone view
Interface modules:
- Mapping module
- Draws map based on the scan from the main sensors
- IFF module
- identifies whether the items are inert, friendly or hostile (colours them in the view)
- Transponder Reader
- Class 1 shows robot designations on HUD
- Class 2 allows recording a robots complete electronic signature
- Transponder Spoofer
- Allows spoofing own transponder with transponders recorded with the Class 2 reader
- The dumber a robot is the easier it is to be fooled by a transponder
- Using a wrong type of transponder is suspicious (civilian in military area, non-maintenance types in maintenance areas, etc.)
- Other modules
Locomotion:
- Hover (robot can move in any direction, turn in place)
- Omniwheels (same, but slower, turn in place)
- Legs (Can move in any direction, turn in place, but much faster forward)
- Wheels (forward/back, has turn radius)
- Tracked (forward/back, can turn in place)
Armament Mounts:
- Fixed mount (requires turning the entire droid)
- Slewable turret (independent aiming)
- Handheld (very fast turret with limited slew angles)