Open an issue in gitlab with the logs of the execution of the program.
A member registered Aug 10, 2019 · View creator page →
Creator of

Recent community posts
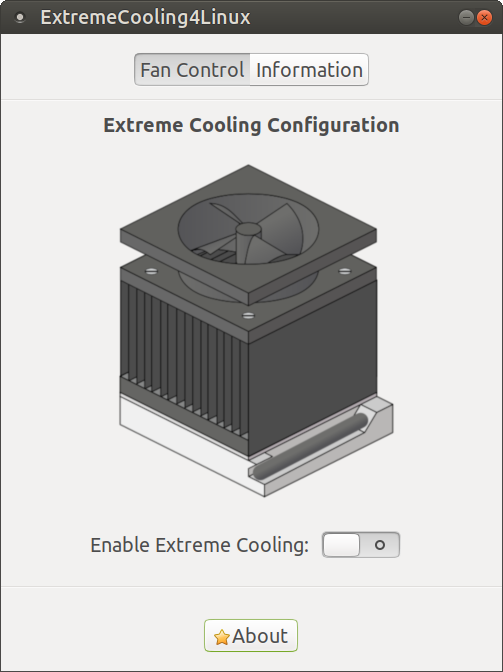
itch.io Community » General » Release Announcements · Created a new topic ExtremeCooling4Linux an open source program to enable Lenovo Extreme Cooling on Linux
Hello Linux users!
Lenovo Extreme Cooling is a special fan mode that you can activate in Lenovo Nerve Center but this program only works on Windows. I have a Lenovo Legion Y520 laptop, so I created a Gtk3 program to enable Extreme Cooling on Linux.
You can download from https://odintdh.itch.io/extremecooling4linux
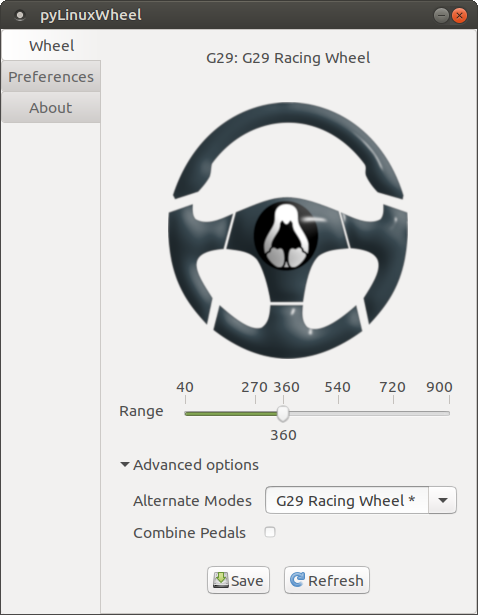
itch.io Community » General » Release Announcements · Created a new topic pyLinuxWheel, a program to configure your Logitech Steering Wheel
Hello Linux gamers!
If you have a Logitech Steering Wheel and you are a Linux user then I have an open source program that can be useful for you. PyLinuxWheel is a graphical program developed in gtk3 to configure your Logitech Steering Wheel in Linux. You can read its features and download from https://odintdh.itch.io/pylinuxwheel