The Game
In this game you take on the role of a software engineer in the late 70's at ming Inc. using the new ming M80 chip, your task is to develop a functional robot. While your colleague mainly takes care of the hardware, your task is to develop the drivers and write control programs.
The game is a NimbleBeasts community project within the #Devtober event and is in a very early stage of development. We still want to get a lot of feedback, so we want to post a devlog in regular intervals.
What happend so far
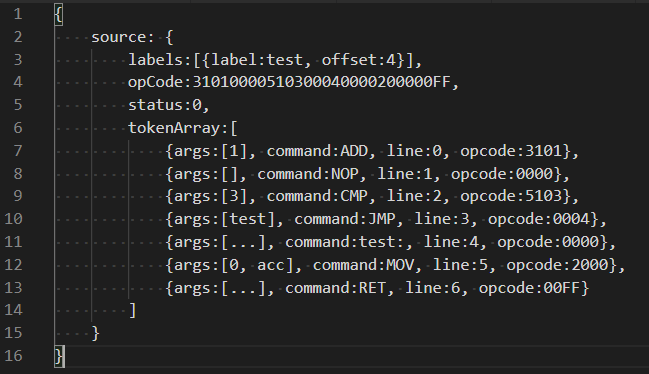
We love retro. And we love fantasy consoles. Inspired by the CHIP-8 and the games TIS-100 and Shenzen I/O, we came up with the idea to design our own fantasy CPU to create a virtual robot and solve different tasks. The player takes the role of the software developer, who should breathe life into the robot. On the first day we built a small prototype, which interpreted an assembly dialect directly. But since this seemed a bit too superficial to us, we wanted to dive a bit deeper and actually transfer the assembly code into our own OpCode and run it from our virtual ROM.
On the second day we started to define our assembly commands and OpCodes.
WIP: CPU Specification
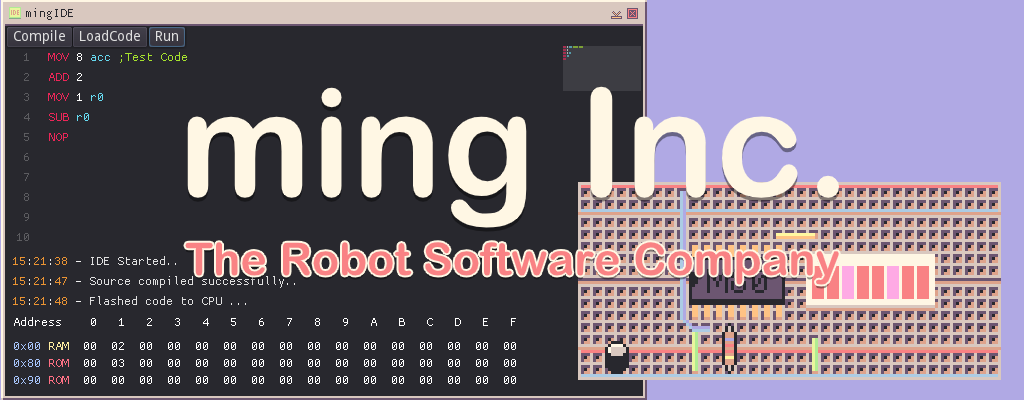
The planned virtual CPU (M80) will have 256 bytes of RAM and 512 bytes of ROM on which both program code and constants will be stored.
The CPU has access to 8 registers. The acc register on which all arithmetic operations take place, r0 - r7 as buffer and the ctrl register in which the status and options can be viewed or changed. For communication with other electronic components the M80 has eight pins, all of which can be used in an analog (0, 1 or 0V, 5V). Four of these eight pins can be switched into a digital operating mode to transmit values from 0 - 127.
OpCodes and Assembly Language
We specified 25 commands right now. If you are interested in which, please have a look on this file:
https://github.com/NimbleBeasts/Devtober2020-Game/blob/master/M80-Spec.md
Thanks for reading! We are looking forward to your comments and questions.
Original Post: https://nimblebeastscollective.itch.io/ming-inc/devlog/183451/day-1-2-brainstorm...