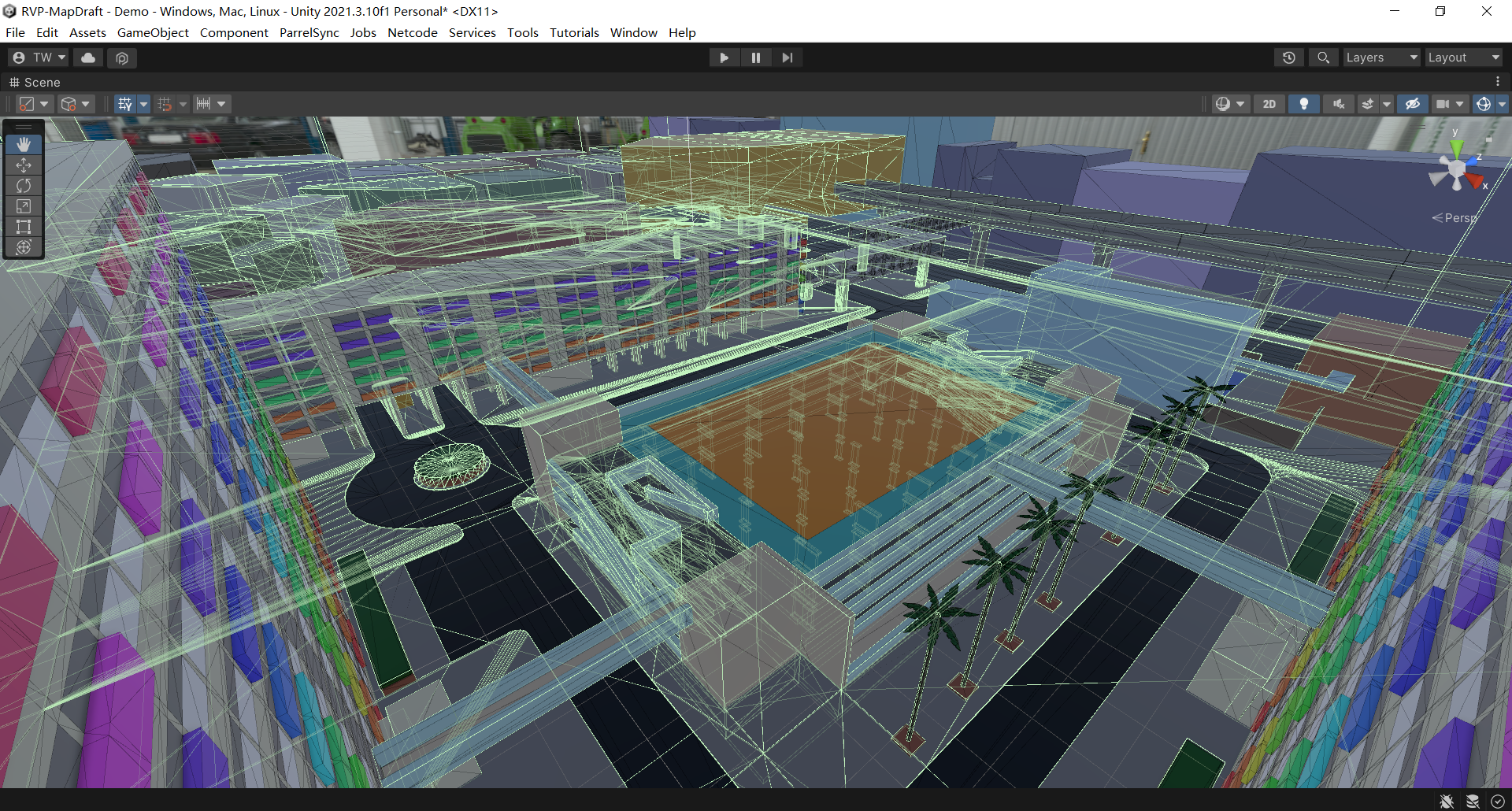
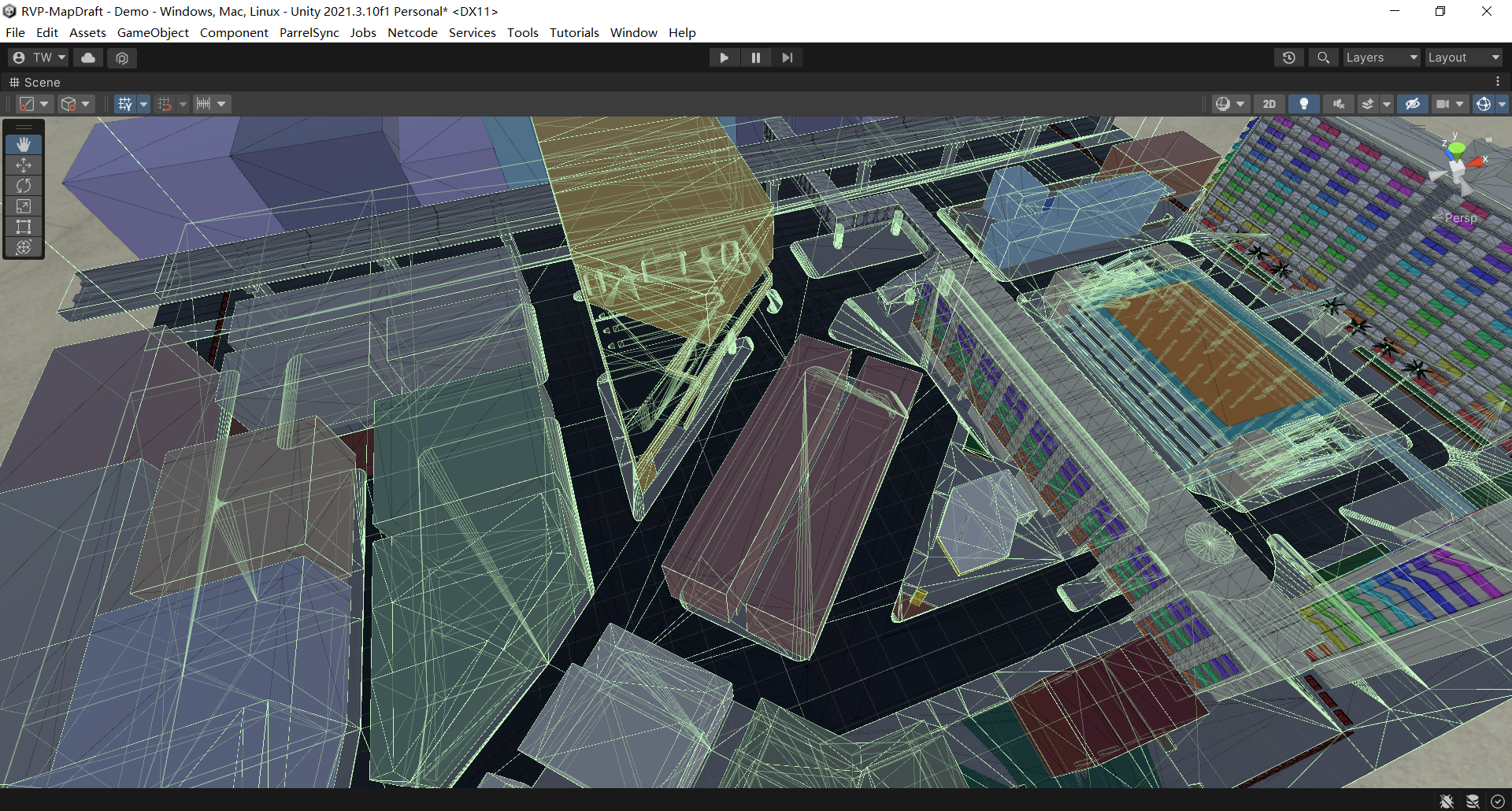
The entire map need colliders in order for it to be a solid surface that cars can drive on. However, it would be horrible to just use mesh colliders for all of them, because some meshes are quite complex so they might drain performance quickly. Therefore, I fully separate every part of my map into two types:
This was first iteration of test driving on the map which I was really excited about, after modelling the map for about a month. Although I was was quite happy about how the map looks, it was still important to evaluate on it from my first-hand driving experience on it, to make driving on the map an actually fantastic experience when navigating and traversing through different areas.
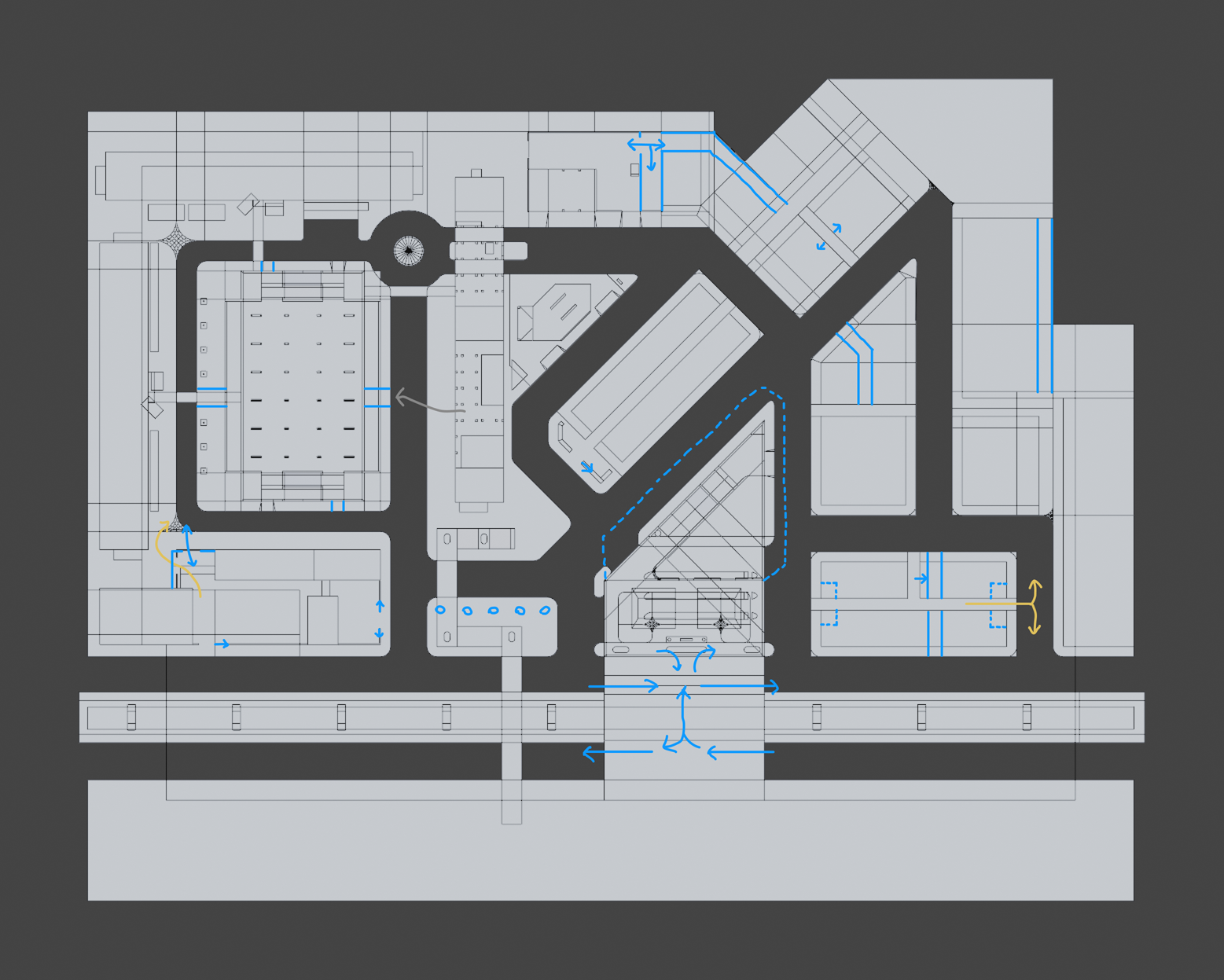
After driving around the map for a sufficiently long time, these are my markups on the map about how it can be improved. The main suggestions include:
I'm going to edit the map accordingly and carry out the second iteration of the map design in the future.
Did you like this post? Tell us
